Box2D Mouse Joint
Description
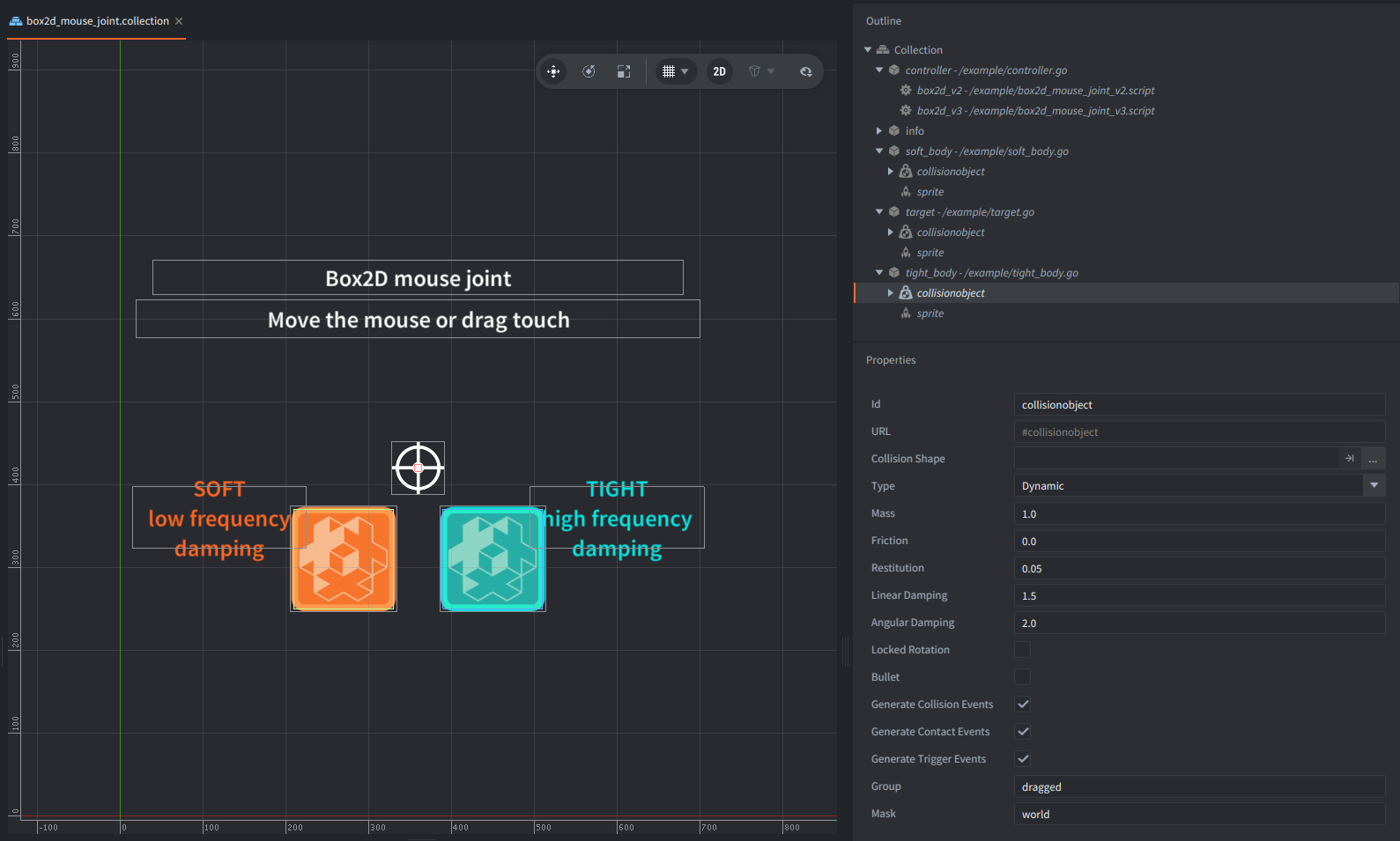
This example shows how to create and control Box2D mouse joints from Lua. A visible target point moves automatically until you move the mouse or drag a touch point. Two dynamic bodies follow the same target with different spring settings, making the softer joint stretch behind the target while the tighter joint follows more closely.
What You’ll Learn
- How to get Box2D bodies from collision object components with
b2d.get_body(). - How to create a mouse joint with
b2d.joint.create_mouse(). - How
frequency(V2) orhertz(V3),damping_ratio, andmax_forceaffect spring-like motion. - How to update the joint target every frame with
b2d.joint.set_mouse_target().
Setup
The collection contains 5 game objects:
controller- Contains both backend scripts,
box2d_mouse_joint_v2.scriptandbox2d_mouse_joint_v3.script. Each script checks the active Box2D version and only one script runs. target- Contains the visible target sprite and a static collision object. The static body is used as the mouse-joint anchor.
soft_body- Contains the orange sprite and a dynamic collision object. This body is connected with lower spring frequency/hertz and damping, so it follows the target more softly.
tight_body- Contains the blue sprite and a dynamic collision object. This body is connected with higher spring frequency/hertz, damping, and max force, so it follows the target more tightly.
info- Contains labels for the soft body, tight body, input instruction, and active Box2D backend.
The project uses box2D_V2.appmanifest by default. To compare the newer backend, switch the native extension app manifest in game.project to box2D_V3.appmanifest.
How It Works
The mouse joint connects the invisible static body to a dynamic body. The joint does not move the body instantly. Instead, it applies a limited spring-damper force toward the target position. This is why the body can stretch, overshoot, and settle.
The V2 script uses frequency and damping_ratio in the joint definition. The V3 script uses hertz and damping_ratio. Both scripts then call b2d.joint.set_mouse_target() every frame so the target can move continuously.
The example creates two mouse joints with different values. The orange body uses a lower frequency/hertz and lower damping, so it visibly lags behind. The blue body uses a higher frequency/hertz, more damping, and a larger max force, so it feels tighter and follows the target more directly.
Scripts
box2d_mouse_joint_v3.script
local TOUCH = hash("touch")
local START_TARGET = vmath.vector3(360, 420, 0)
local SOFT_START = vmath.vector3(270, 310, 0)
local TIGHT_START = vmath.vector3(450, 310, 0)
local SOFT_LINE_COLOR = vmath.vector4(1.0, 0.65, 0.22, 1.0)
local TIGHT_LINE_COLOR = vmath.vector4(0.35, 0.85, 1.0, 1.0)
local TARGET_LINE_COLOR = vmath.vector4(0.45, 1.0, 0.65, 1.0)
local function draw_line(from, to, color)
-- <1> Draw a debug/helper line through the render socket.
-- These lines are not persistent scene objects. They exist for one frame,
-- so the script redraws them every update.
msg.post("@render:", "draw_line", {
start_point = from,
end_point = to,
color = color
})
end
local function set_target(self, position)
-- <2> Store the current mouse-joint target as a world-space position.
-- The mouse joint does not connect to a real "mouse body". It tracks this
-- world point, which we later pass to b2d.joint.set_mouse_target().
self.target = vmath.vector3(position.x, position.y, 0)
-- <3> Move the visible target marker so users can see what point the
-- mouse joints are trying to follow.
go.set_position(self.target, self.target_url)
end
local function reset_body(body, position)
-- <4> Teleport the physics body to a known start position.
-- b2d.body.set_transform() directly sets the Box2D body's world transform.
-- This is useful for setup/reset, but should generally not be used every
-- frame for normal gameplay motion because it bypasses physical simulation.
b2d.body.set_transform(body, position, 0)
-- <5> Clear leftover motion so both bodies start the example cleanly.
b2d.body.set_linear_velocity(body, vmath.vector3())
b2d.body.set_angular_velocity(body, 0)
-- <6> Wake the body so Box2D immediately simulates it after the reset.
-- This is safer here than relying on b2d.joint.wake_bodies(), which may not
-- be available in all beta/V2 runtime builds.
b2d.body.set_awake(body, true)
end
local function setup_body(body)
-- <7> Disable gravity for this body.
-- A mouse joint is easiest to understand when the only visible force is the
-- spring-like pull toward the target, not gravity pulling the body downward.
b2d.body.set_gravity_scale(body, 0)
-- <8> Prevent rotation.
-- This keeps the demo visually focused on mouse-joint translation/stretching
-- instead of the boxes spinning while they follow the target.
b2d.body.set_fixed_rotation(body, true)
-- <9> Add linear damping.
-- This damps velocity over time and helps the bodies settle instead of
-- sliding forever after the target moves.
b2d.body.set_linear_damping(body, 1.5)
end
local function create_mouse_joints(self)
-- <10> Get native Box2D body handles from Defold collision object components.
-- b2d.get_body() takes a collision object URL and returns the b2Body handle
-- used by the new Box2D scripting API.
local anchor_body = b2d.get_body(msg.url(nil, "target", "collisionobject"))
self.soft_body = b2d.get_body(msg.url(nil, "soft_body", "collisionobject"))
self.tight_body = b2d.get_body(msg.url(nil, "tight_body", "collisionobject"))
setup_body(self.soft_body)
setup_body(self.tight_body)
reset_body(self.soft_body, SOFT_START)
reset_body(self.tight_body, TIGHT_START)
-- <11> Create the softer mouse joint.
-- A mouse joint connects two Box2D bodies, but its main job is to make body_b
-- follow a world-space target point. Here the target object acts as the
-- static reference body, and soft_body is the dynamic body being pulled.
self.soft_joint = b2d.joint.create_mouse(anchor_body, self.soft_body, {
-- <12> Initial world target. This will be updated every frame later.
target = self.target,
-- <13> Maximum force the joint is allowed to apply.
-- Lower values make the body lag behind more because the joint cannot
-- instantly pull it to the target.
max_force = 850,
-- <14> Spring frequency in Box2D V3 terms.
-- Lower hertz means a softer, slower spring.
hertz = 1.5,
-- <15> Damping ratio controls how much oscillation is removed.
-- Lower damping allows more elastic movement and visible overshoot.
damping_ratio = 0.35,
-- <16> The connected bodies should not collide with each other.
-- This is usually what you want for a joint demonstration.
collide_connected = false,
})
-- <17> Create the tighter mouse joint.
-- It follows the same target, but with much stronger spring settings.
self.tight_joint = b2d.joint.create_mouse(anchor_body, self.tight_body, {
target = self.target,
-- <18> Higher max_force lets the joint pull harder.
max_force = 6500,
-- <19> Higher hertz means the spring reacts faster and feels stiffer.
hertz = 8.0,
-- <20> Higher damping removes oscillation, so the body follows in a
-- tighter, more controlled way.
damping_ratio = 0.9,
collide_connected = false,
})
end
local function update_auto_target(self, dt)
if self.user_control then
return
end
-- <21> Animate the target before the user touches/clicks.
-- This keeps the example alive on the website even without interaction.
self.time = self.time + dt
set_target(self, vmath.vector3(
360 + math.cos(self.time * 1.35) * 170,
395 + math.sin(self.time * 1.10) * 95,
0
))
end
local function update_joints(self)
-- <22> Update both mouse joints with the current target.
-- This is the key runtime control call. The joint was created once in init(),
-- but its target can be changed every frame.
b2d.joint.set_mouse_target(self.soft_joint, self.target)
b2d.joint.set_mouse_target(self.tight_joint, self.target)
-- <23> Make sure the bodies are awake when the target moves.
-- Sleeping bodies may not visibly react until woken by the simulation.
b2d.body.set_awake(self.soft_body, true)
b2d.body.set_awake(self.tight_body, true)
end
local function draw_connections(self)
-- <24> Query the current simulated body positions from Box2D.
-- We draw lines from the target to each body to visualize the stretch of
-- each mouse joint.
local soft_position = b2d.body.get_position(self.soft_body)
local tight_position = b2d.body.get_position(self.tight_body)
draw_line(self.target, soft_position, SOFT_LINE_COLOR)
draw_line(self.target, tight_position, TIGHT_LINE_COLOR)
-- <25> Draw a small cross at the target point so the user can clearly see
-- what the bodies are following.
draw_line(self.target + vmath.vector3(-18, 0, 0), self.target + vmath.vector3(18, 0, 0), TARGET_LINE_COLOR)
draw_line(self.target + vmath.vector3(0, -18, 0), self.target + vmath.vector3(0, 18, 0), TARGET_LINE_COLOR)
end
function init(self)
-- <26> Run this script only when the active Box2D backend is V3.
-- The same collection can include both V2 and V3 scripts, but only one
-- should initialize depending on the current app manifest/backend.
self.active = b2d.get_version().major == 3
if not self.active then
return
end
self.target_url = msg.url(nil, "target", nil)
self.time = 0
self.user_control = false
set_target(self, START_TARGET)
create_mouse_joints(self)
-- <27> Show which backend-specific script is active.
label.set_text("/info#version_label", "Box2D V3 mouse joint")
-- <28> Acquire input focus so this script receives mouse/touch input in
-- on_input().
msg.post(".", "acquire_input_focus")
end
function update(self, dt)
if not self.active then
return
end
update_auto_target(self, dt)
update_joints(self)
draw_connections(self)
end
function on_input(self, action_id, action)
if not self.active then
return
end
-- <29> Mouse input commonly arrives with action_id == nil, while touch input
-- uses the "touch" binding. Both provide screen-space x/y coordinates here.
if (action_id == TOUCH or action_id == nil) and action.x and action.y then
self.user_control = true
set_target(self, vmath.vector3(action.x, action.y, 0))
end
end
function final(self)
if not self.active then
return
end
-- <30> Destroy scripted joints explicitly when the script is finalized.
-- This keeps the example clean when the collection is unloaded or hot-reloaded.
b2d.joint.destroy(self.soft_joint)
b2d.joint.destroy(self.tight_joint)
msg.post(".", "release_input_focus")
end
--[[
1. `@render:` is Defold's render socket. The "draw_line" message draws a temporary helper line.
2. A mouse joint follows a world-space target point. It does not require the mouse itself to be a physics body.
3. The target marker is only visual. Moving it makes the invisible target position understandable.
4. `b2d.body.set_transform()` directly sets the Box2D body position and angle. Good for reset/setup, not for continuous gameplay movement.
5. Clearing velocity prevents the reset state from inheriting old momentum.
6. `b2d.body.set_awake()` forces the body to participate in simulation immediately.
7. `b2d.body.set_gravity_scale(body, 0)` disables gravity for this body only.
8. `b2d.body.set_fixed_rotation(body, true)` prevents the body from rotating, keeping the example readable.
9. `b2d.body.set_linear_damping()` makes velocity decay over time, reducing endless drift.
10. `b2d.get_body()` converts a Defold collision object component URL into a native Box2D body handle.
11. `b2d.joint.create_mouse()` creates a mouse joint between two bodies. The second body is the one visibly pulled toward the target.
12. `target` is the initial world-space point the mouse joint tries to follow.
13. `max_force` caps the force used by the joint. Too low = very stretchy; higher = stronger pull.
14. `hertz` is the V3 spring frequency. Lower values feel softer, higher values feel tighter.
15. `damping_ratio` controls oscillation. Lower values bounce more; higher values settle faster.
16. `collide_connected = false` prevents the two bodies connected by the joint from colliding.
17. The tight joint uses the same API but different parameters, demonstrating how tuning changes the feel.
18. Higher `max_force` allows stronger correction toward the target.
19. Higher `hertz` makes the constraint respond faster.
20. Higher `damping_ratio` removes more bounce.
21. Automatic target motion makes the example self-demonstrating.
22. `b2d.joint.set_mouse_target()` updates the world target of an existing mouse joint every frame.
23. Waking bodies avoids cases where sleeping physics bodies do not react immediately to the changed target.
24. `b2d.body.get_position()` reads the current simulated world position from Box2D.
25. The target cross is a visual helper, not part of the physics simulation.
26. `b2d.get_version().major` lets one shared collection choose the correct backend-specific script.
27. `label.set_text()` updates the on-screen backend label.
28. `acquire_input_focus` is required before this script receives `on_input()` callbacks.
29. Pointer input takes over from automatic motion and drives the mouse-joint target directly.
30. `b2d.joint.destroy()` removes joints created through the scripted joint API.
]]box2d_mouse_joint_v2.script
local TOUCH = hash("touch")
local START_TARGET = vmath.vector3(360, 420, 0)
local SOFT_START = vmath.vector3(270, 310, 0)
local TIGHT_START = vmath.vector3(450, 310, 0)
local SOFT_LINE_COLOR = vmath.vector4(1.0, 0.65, 0.22, 1.0)
local TIGHT_LINE_COLOR = vmath.vector4(0.35, 0.85, 1.0, 1.0)
local TARGET_LINE_COLOR = vmath.vector4(0.45, 1.0, 0.65, 1.0)
local function draw_line(from, to, color)
-- <1> Draw a debug/helper line through the render socket.
-- The line exists for one frame only, so it must be redrawn every update.
msg.post("@render:", "draw_line", {
start_point = from,
end_point = to,
color = color
})
end
local function set_target(self, position)
-- <2> Store the current mouse-joint target as a world-space point.
-- The mouse/touch pointer is not a Box2D body. It is only a target position
-- that the mouse joint tries to pull the dynamic body toward.
self.target = vmath.vector3(position.x, position.y, 0)
-- <3> Move the visible target marker so the user can see the point followed
-- by both mouse joints.
go.set_position(self.target, self.target_url)
end
local function reset_body(body, position)
-- <4> Set the Box2D body transform directly.
-- This is good for example setup/reset. Do not use this as normal per-frame
-- movement, because it teleports the body and can produce non-physical motion.
b2d.body.set_transform(body, position, 0)
-- <5> Clear previous motion so the example starts from a deterministic state.
b2d.body.set_linear_velocity(body, vmath.vector3())
b2d.body.set_angular_velocity(body, 0)
-- <6> Wake the body so it reacts immediately after reset.
b2d.body.set_awake(body, true)
end
local function setup_body(body)
-- <7> Disable gravity for this body.
-- This keeps the example focused on the mouse-joint spring behaviour.
b2d.body.set_gravity_scale(body, 0)
-- <8> Prevent the body from rotating.
-- Rotation would add noise to the visual explanation, while this example is
-- about soft versus tight positional following.
b2d.body.set_fixed_rotation(body, true)
-- <9> Add linear damping.
-- This reduces endless sliding and helps the body settle after movement.
b2d.body.set_linear_damping(body, 1.5)
end
local function create_mouse_joints(self)
-- <10> Get native Box2D body handles from Defold collision object components.
-- `target` acts as the static/reference body for the mouse joints.
local anchor_body = b2d.get_body(msg.url(nil, "target", "collisionobject"))
self.soft_body = b2d.get_body(msg.url(nil, "soft_body", "collisionobject"))
self.tight_body = b2d.get_body(msg.url(nil, "tight_body", "collisionobject"))
setup_body(self.soft_body)
setup_body(self.tight_body)
reset_body(self.soft_body, SOFT_START)
reset_body(self.tight_body, TIGHT_START)
-- <11> Create a soft V2 mouse joint.
-- In Box2D V2-style definitions, spring frequency is controlled by
-- `frequency`, not `hertz`.
self.soft_joint = b2d.joint.create_mouse(anchor_body, self.soft_body, {
-- <12> Initial world target. This value is later updated every frame.
target = self.target,
-- <13> Maximum force the joint can apply.
-- Lower max force allows more visible lag/stretch.
max_force = 850,
-- <14> V2 spring frequency.
-- Lower frequency makes the body follow more softly and slowly.
frequency = 1.5,
-- <15> Damping ratio.
-- Lower damping allows more bounce/overshoot.
damping_ratio = 0.35,
-- <16> The connected bodies should not collide with each other.
collide_connected = false,
})
-- <17> Create a tighter V2 mouse joint.
-- It follows the same target, but uses stronger/stiffer parameters.
self.tight_joint = b2d.joint.create_mouse(anchor_body, self.tight_body, {
target = self.target,
-- <18> Higher max force means the body can be pulled more aggressively.
max_force = 6500,
-- <19> Higher frequency means a stiffer/faster spring response.
frequency = 8.0,
-- <20> Higher damping removes more oscillation.
damping_ratio = 0.9,
collide_connected = false,
})
end
local function update_auto_target(self, dt)
if self.user_control then
return
end
-- <21> Animate the target automatically before user interaction.
-- This makes the example demonstrate itself on the examples website.
self.time = self.time + dt
set_target(self, vmath.vector3(
360 + math.cos(self.time * 1.35) * 170,
395 + math.sin(self.time * 1.10) * 95,
0
))
end
local function update_joints(self)
-- <22> Update both mouse joints with the current world target.
-- The joints are created once, but their target can be changed every frame.
b2d.joint.set_mouse_target(self.soft_joint, self.target)
b2d.joint.set_mouse_target(self.tight_joint, self.target)
-- <23> Keep the bodies awake while the target moves.
-- This avoids relying on b2d.joint.wake_bodies(), which may not exist in
-- the active V2 runtime.
b2d.body.set_awake(self.soft_body, true)
b2d.body.set_awake(self.tight_body, true)
end
local function draw_connections(self)
-- <24> Read the current simulated positions from Box2D.
-- These positions are the result of the physics step, not manually animated
-- sprite positions.
local soft_position = b2d.body.get_position(self.soft_body)
local tight_position = b2d.body.get_position(self.tight_body)
-- <25> Draw spring-like helper lines from the target to each body.
-- The longer the line, the more that body is lagging/stretching.
draw_line(self.target, soft_position, SOFT_LINE_COLOR)
draw_line(self.target, tight_position, TIGHT_LINE_COLOR)
-- <26> Draw a small cross at the target point.
draw_line(self.target + vmath.vector3(-18, 0, 0), self.target + vmath.vector3(18, 0, 0), TARGET_LINE_COLOR)
draw_line(self.target + vmath.vector3(0, -18, 0), self.target + vmath.vector3(0, 18, 0), TARGET_LINE_COLOR)
end
function init(self)
-- <27> Run this script only when the active Box2D backend is V2.
-- The same collection may contain both V2 and V3 scripts, but only the
-- matching one should initialize.
self.active = b2d.get_version().major == 2
if not self.active then
return
end
self.target_url = msg.url(nil, "target", nil)
self.time = 0
self.user_control = false
set_target(self, START_TARGET)
create_mouse_joints(self)
-- <28> Show which backend-specific script is active.
label.set_text("/info#version_label", "Box2D V2 mouse joint")
-- <29> Required before this script receives on_input() callbacks.
msg.post(".", "acquire_input_focus")
end
function update(self, dt)
if not self.active then
return
end
update_auto_target(self, dt)
update_joints(self)
draw_connections(self)
end
function on_input(self, action_id, action)
if not self.active then
return
end
-- <30> Mouse input usually comes with action_id == nil, while touch input
-- uses the configured "touch" binding. Both provide x/y screen coordinates.
if (action_id == TOUCH or action_id == nil) and action.x and action.y then
self.user_control = true
set_target(self, vmath.vector3(action.x, action.y, 0))
end
end
function final(self)
if not self.active then
return
end
-- <31> Destroy scripted joints explicitly when the script is finalized.
b2d.joint.destroy(self.soft_joint)
b2d.joint.destroy(self.tight_joint)
msg.post(".", "release_input_focus")
end
--[[
1. `@render:` is Defold's render socket. The "draw_line" message draws a temporary helper line.
2. A mouse joint follows a world-space target point. The pointer itself is not a physics body.
3. The target marker is only visual. It helps show what the bodies are trying to follow.
4. `b2d.body.set_transform()` directly changes the body's world transform. Good for setup/reset, not continuous movement.
5. Clearing linear and angular velocity removes previous momentum.
6. `b2d.body.set_awake()` wakes the body so it reacts immediately in the simulation.
7. `b2d.body.set_gravity_scale(body, 0)` disables gravity for this body only.
8. `b2d.body.set_fixed_rotation(body, true)` prevents rotation and keeps the visual demonstration clean.
9. `b2d.body.set_linear_damping()` damps velocity over time and reduces endless drift.
10. `b2d.get_body()` converts a Defold collision object URL into a Box2D body handle used by the b2d API.
11. `b2d.joint.create_mouse()` creates a mouse joint between two bodies. The second body is the one visibly pulled toward the target.
12. `target` is the initial world-space target point.
13. `max_force` caps how strongly the joint can pull. Lower values create more visible stretch.
14. `frequency` is the V2 spring frequency. Lower values feel softer; higher values feel tighter.
15. `damping_ratio` controls bounce and overshoot. Lower values oscillate more; higher values settle faster.
16. `collide_connected = false` prevents the connected bodies from colliding with each other.
17. The tight joint uses the same mouse-joint API but different parameters.
18. Higher `max_force` lets the joint correct the body's position more strongly.
19. Higher `frequency` makes the spring respond faster.
20. Higher `damping_ratio` removes more oscillation.
21. Automatic target motion keeps the example animated before the user interacts.
22. `b2d.joint.set_mouse_target()` updates the world target of an existing mouse joint.
23. Waking the bodies avoids sleeping-body cases where the target changes but the body does not visibly react immediately.
24. `b2d.body.get_position()` reads the current simulated world position of a body.
25. The helper lines visualize how far each body stretches away from the target.
26. The target cross is a visual helper, not part of the physics simulation.
27. `b2d.get_version().major` selects the backend-specific script.
28. `label.set_text()` updates the label. It uses message passing internally, so the URL must be correct.
29. `acquire_input_focus` is needed to receive `on_input()`.
30. Pointer input switches the example from automatic motion to direct user-controlled target movement.
31. `b2d.joint.destroy()` removes joints created through the scripted joint API.
]]